
Raspberry Pi INDI System②
KStars/EKOS
1. Kstars/EKOSの初期設定
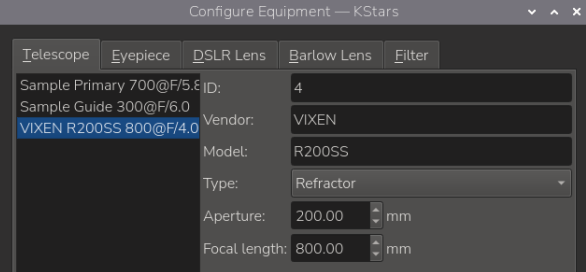
1.1 Equipmentの登録
Tool → Devices → List your Equipmentで、天体望遠鏡の仕様を入力します。
図は、VIXENのR200SSを入力した例です。
1.2 EKOSの起動
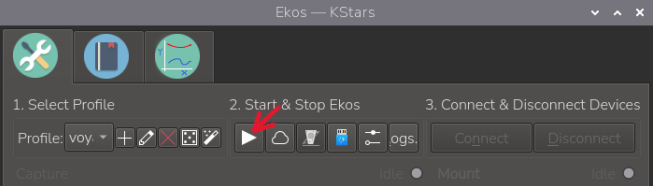
次に、観測ドームのアイコンをクリックし、EKOSを起動します。

右の図がEKOSのウインドウになります。まず、1のプロファイルを作っていきます。
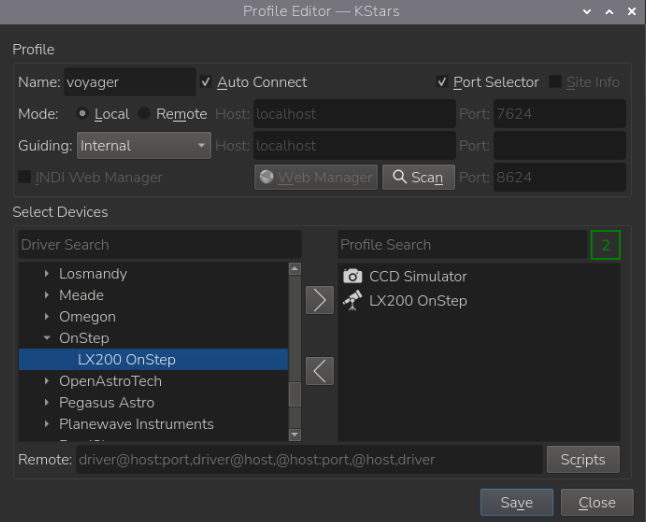
+マークのアイコンをクリックし、新しいプロファイルを作成します。

Profile Editorでは、CCDとTelescopesを設定します。
ここでは、CCDは使用しませんがEKOSを動かすためには、設定する必要があります。ダミーである、CCDsのCCD simulatorを選択します。
CCDs → Simulator → CCD Simulator
Telescopesは、赤道儀のコントローラを設定します。Onsetepの場合は、以下を選択します。
Telescopes → Onstep → LX200 Onstep
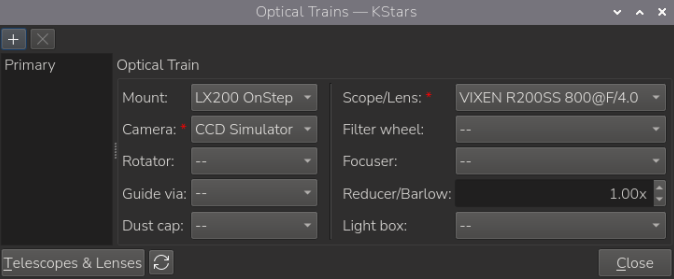
その次はEKOSをスタートさせます。スタートアイコンをクリックすると、Optical Trainsのウインドウが開きます。
MountにOnstep、CameraにSimulator、Scope/Lensに、最初に登録した使用している望遠鏡を選択します。
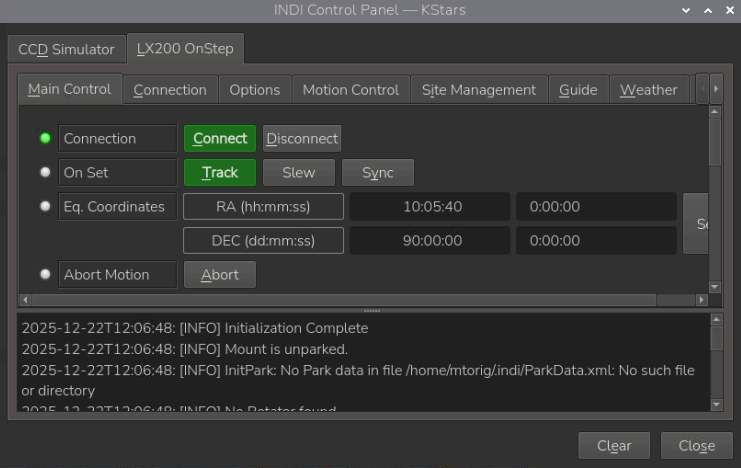
INDI Control Panelも起動されます。
Connectの状態となり、エラーが出ていなければ、接続成功で、赤道儀を制御できる状態になります。
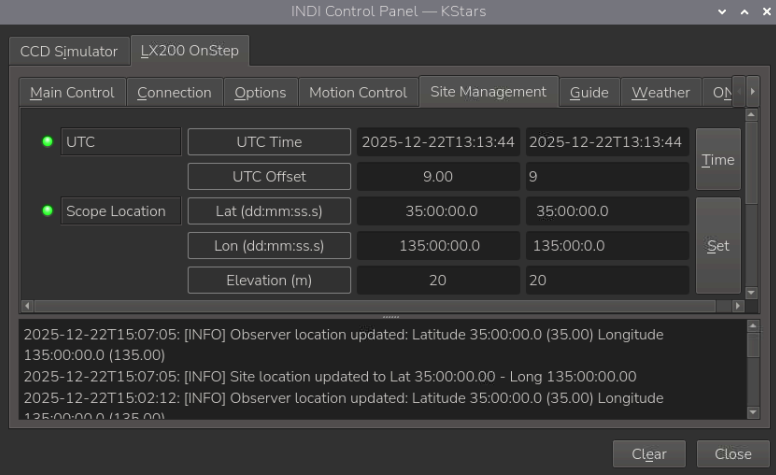
2. 位置情報の設定
時間、位置情報の入力は、INDI Control Panel→LX200 OnStep → Site anagementのタブで設定します。
UTC Offsetは、世界標準時からの時差)、Scope Locationで経度、緯度、標高を入力します。
3. Goto/Sync操作
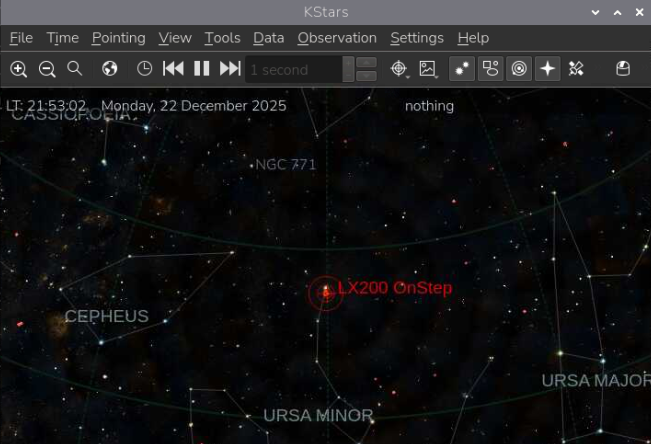
EKOSにより、通信が確立後に、KStarsの画面に戻ると、北極星の位置に望遠鏡のポジションを表すインジケータが現れます。
画面のLX200 Onstepのインジケータが、現在の望遠鏡が向いている位置を表しています。
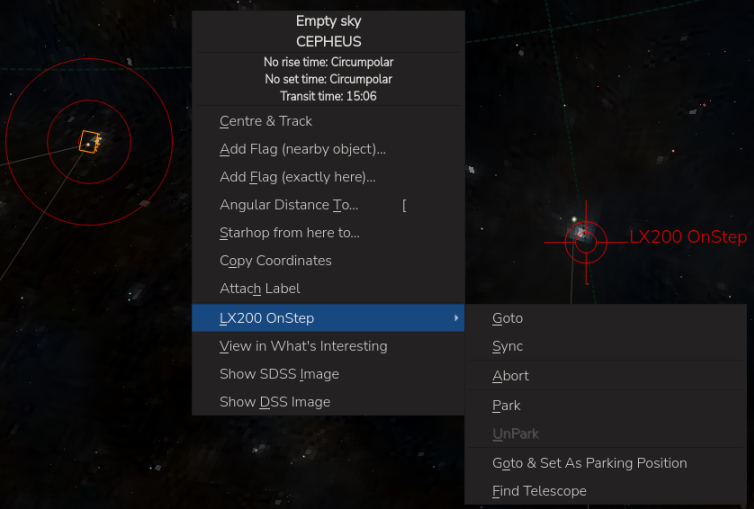
画面上で右クリックし、メニューを開いて、LX200 Onstepから望遠鏡を操作できます。
Goto: 指示している場所に、望遠鏡の向きを動かします。
Sync: 指示してい場所が、現在位置であるとして、認識させます。
4. フィールドでの操作
2回目以降の運用では、KStars/Ekosを起動し、[Start]アイコンを押すだけで、前回の設定が自動的に読み込まれるため、操作は非常に簡単です。以下に、フィールドでの基本的な手順をまとめます。
4.1 望遠鏡の設置
フィールドでは、まず極軸望遠鏡を用いて極軸を合わせ、主鏡を天の北極方向に向けた状態で望遠鏡を設置します。その後、KStars/EkosとOnStepの通信を開始します。
4.2 コントローラの起動
Windows PC、Raspberry Pi、OnStepコントローラの電源を入れます。すべてが起動したのちに、Windows PCからVNCを介して、Raspberry PiのKStarsを起動します。EKOSで通信を確立すると、望遠鏡が操作できる状態になります。
SWSも使用可能なため、そちらで通信確認を行うこともできます。
ここで、必要に応じて、時間・位置情報を設定します。
4.3 同期(Sync)
観測対象に近い、識別しやすい明るい恒星を選んでGOTOを実行します。導入後、ハンドコントローラを使用して星を画面中央に調整し、Ekos上で[Sync]を実行することで、マウントの座標系と実際の空の位置を正確に一致させます。
note: バックラッシュのキャンセルとアプローチ方向
GOTO動作時には、バックラッシュの影響を最小限に抑えるため、OnStepは常に一定の方向から目標天体にアプローチします。手動による調整の際もこれに合わせることで、正確な位置合わせができます。
- 赤経(RA)軸:常に東から西方向にアプローチします(恒星時追尾と同じ方向)。
- 赤緯(DEC)軸:天体の位置に応じてアプローチ方向が変化しますが、モーターの回転方向は常に一定になるよう制御されます。
| 観測対象の位置 | 赤道儀における鏡筒の位置 | 赤緯アプローチ方向 |
|---|---|---|
| 東の空(子午線未満) | 鏡筒が西側、ウエイトが東側に位置 | 北から南にアプローチ |
| 西の空(子午線越え) | 鏡筒が東側、ウエイトが西側に位置 | 南から北にアプローチ |